planning
longitudinal speed planning
YeeKal
•
•
"#planning"
ref:
- 2019-Safe Trajectory Generation for Complex Urban Environments Using Spatio-temporal Semantic Corridor
- 2014-Minimum-time speed optimisation over a fixed path.
- 2013-Optimal Longitudinal Control Planning with Moving Obstacles
- 2021-Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform
- Tunable and Stable Real-Time Trajectory Planning for Urban Autonomous Driving-96
- Efficient Mixed-Integer Programming for Longitudinal and Lateral Motion Planning of Autonomous Vehicles-42
2014-Minimum-time speed optimisation over a fixed path
Estimating derivatives of the path
离散近似的阶数对一阶导近似影响不大,对二阶导近似影响较大。
一阶导近似:$s'(\overline\theta_i)=\frac{s(\theta_i)-s(\theta_{i-1})}{d\theta}$
二阶导近似: 下图线是不同近似阶数再积分后对结果的影响
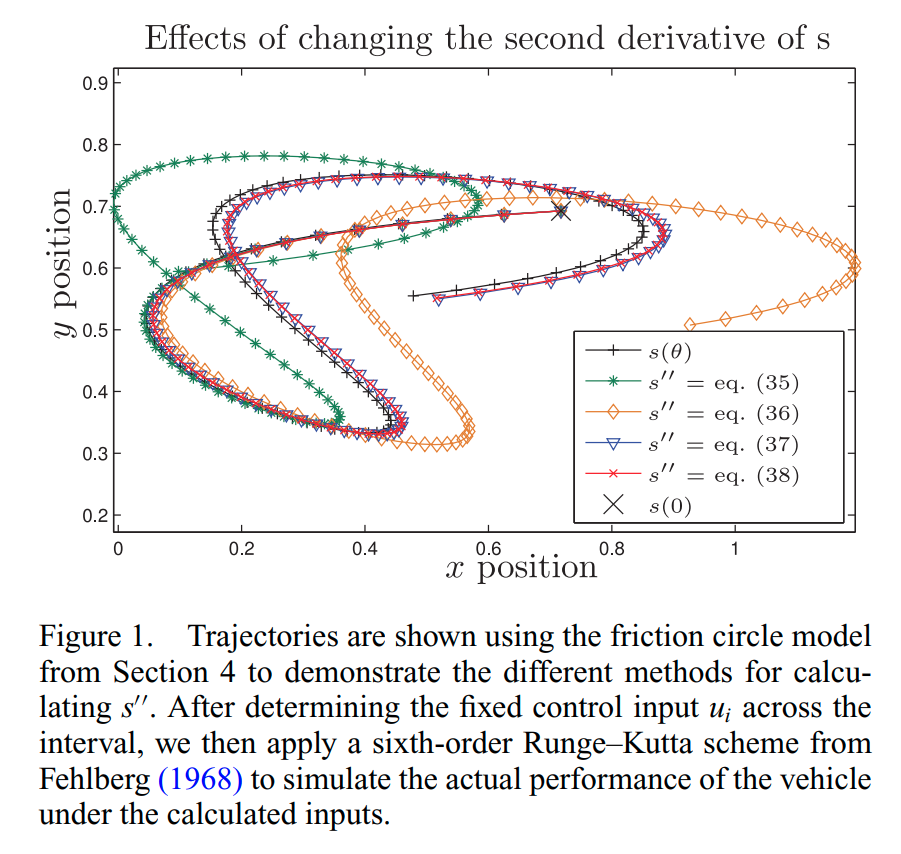
从上图中可以看出,(35)和(36)都是有偏差的二阶模型(second-order models,),而(37)和(38)偏差不大,分别是对称4阶和6阶模型(symmetric fourth- and sixth-order models). 并且由37)和(38)对比来看,对称4阶以上已经没有太大意义,两者几乎没有差距。因此(37)式子可以作为最优选择。
(37)会用到当前点的前两个点,这对于$\theta_1$会有问题,因此创造一个虚拟点$s(\theta_{-1})=2s(0)-s(\theta_1)$, 由此可得: