convex corridor
YeeKal
•
•
"#"
JPS jump point search
运动规划 motion planning 方法motion planning
Obstacle-Free Space
IRIS
Iterative Regional Inflation by SDP
quickly computing large polytopic and ellipsoidal regions of obstacle-free space through a series of convex optimizations
Fast Iterative Region Inflation (FIRI)
Maximum Volume Inscribed Ellipsoid (MVIE)
SFC: Safe Flight Corridor
Ref
- 2017 Planning Dynamically Feasible Trajectories for Quadrotors using Safe Flight Corridors in 3-D Complex Environments
- code
| seed decomp | line segment | iterative decomp | ellipsoid decomp |
|---|---|---|---|
 |
 |
 |
 |
SFC construction
- find ellipsoid
- 根据最近点缩小椭圆
- find polyhedron
- 一步步扩大寻找半平面
- bounding box: 裁剪
- shrink: 寻找更合适的半平面以包括起点和终点
Trajectory optimization
RHP: Receding Horizon Planning
- execution planning $T_e$
- re-planning for the next epoch when the robot is executing the trajectory at the current epoch
ref paper
- Efficient mixed-integer planning for uavs in cluttered environments (ICRA), 2015
- 2015 Computing large convex regions of obstacle-free space through semidefinite programming
GALAXY
Ref
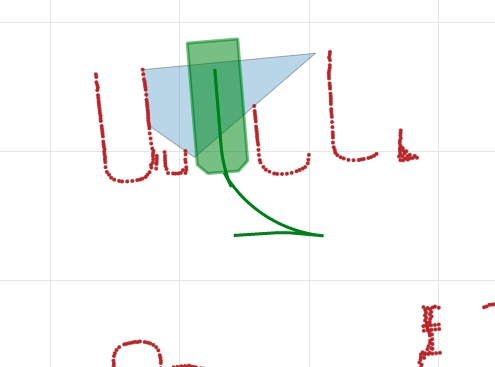
| narrow space | hollow space |
|---|---|
| 狭窄环境的多边形边角突出,难以覆盖整个车形 | 空旷环境下效果较好 |
 |
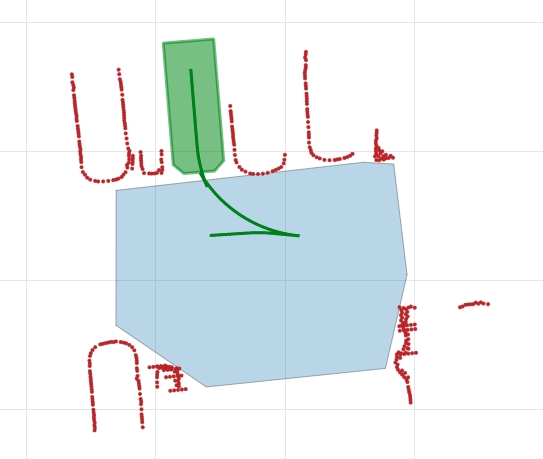 |
依赖障碍物信息, 因此若障碍物分布不好,则找到的空旷区域会比较尖锐。