apollo 中的 openspace path planner
YeeKal
•
•
"#"
采用分步计算:
- 通过hybrid a*计算出初始轨迹
- 进行轨迹平滑
// distance_approach_problem_wrapper.cc
DistancePlan():
// 1st step: call palnner
!hybridA_ptr->Plan(sx, sy, sphi, ex, ey, ephi, XYbounds_, obstacles_ptr->GetObstacleVec(), &hybrid_astar_result))
// 2nd step: trajectory optimization
DistanceSmoothing(planner_open_space_config_, *obstacles_ptr,
piece_wise_sx, piece_wise_sy, piece_wise_sphi,
piece_wise_ex, piece_wise_ey, piece_wise_ephi,
XYbounds_, &partition_trajectories[i],
&state_result_ds_vec[i], &control_result_ds_vec[i],
&time_result_ds_vec[i], &dual_l_result_ds_vec[i],
&dual_n_result_ds_vec[i], dual_tmp, ipopt_tmp)
DistanceSmoothing():
DistanceApproachProblem* distance_approach_ptr =
new DistanceApproachProblem(planner_open_space_config);
bool status = distance_approach_ptr->Solve(); // 根据配置文件选择不同的优化算法
优化方法继承关系:
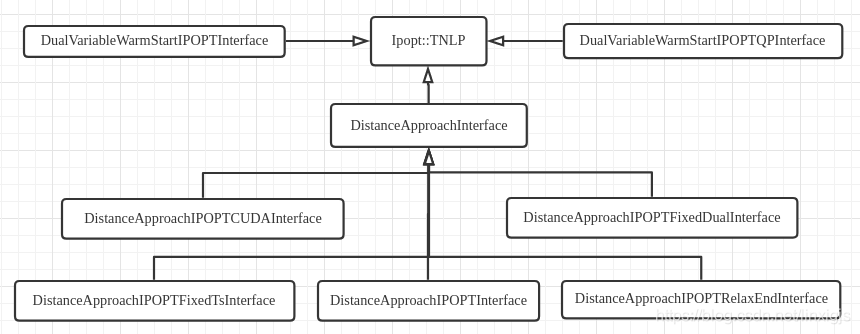
DistanceApproachInterface
/* interface function */
eval_f(); // objective function
eval_grad_f(); // gradient of objective
eval_g(); // constraint residuals
eval_jac_g(); // jacobian
eval_h(); // hessian of lagrangian
DistanceApproachIPOPTInterface
利用Voronoi Diagram计算到障碍物的距离
/**
eval_f() -> eval_obj() // objective function
eval_grad_f() -> gradient() // gradient of objective
eval_g() -> eval_constraints() // constraint residuals
eval_jac_g(); // jacobian
eval_h(); // hessian of lagrangian
**/
eval_obj(n, x, obj_value):
// 1. objective to minimize state diff to warm up
// 2. minimize u square
// 3. minimize input change rate for last value
// 4. minimize input change rate
// 5. minimize total time
eval_constraints():
DistanceApproachIPOPTFixedDualInterface
eval_obj(n, x, obj_value):
// same to upper