industrical driver
motoman driver structure
YeeKal
•
•
"#industrical driver"
mesage connection
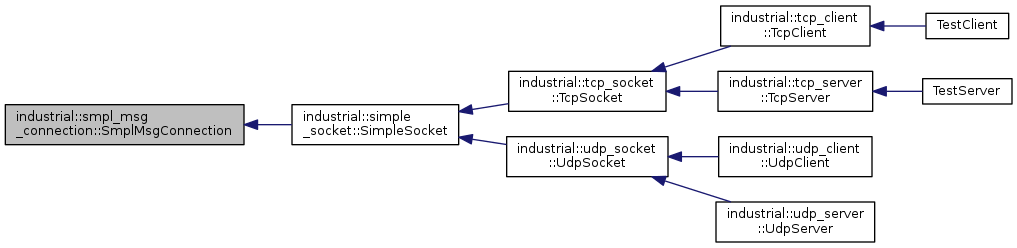
- tcp_client
- tcp_socket
-
tcp_client: init, connect
- tcp_socket: rawSentBytes,rawReceiveBytes,rawPoll. 原生buffer数据收发的执行者
- simple_socket: sendBytes,receiveBytes,发送的是ByteArray类数据,进一步解构后再通过rawSend/Receive进行执行。
sockaddr_in sockaddr_;
int sock_handle_;
//获取socket的函数
int getSockHandle() const
{
return sock_handle_;
}
- smpl_msg_connection: sendAndReceiveMsg,消息收发的高层函数.sendMsg和receiveMsg小队message结构再通过send/receiveBytes执行。
bool sendAndReceiveMsg (industrial::simple_message::SimpleMessage &send, industrial::simple_message::SimpleMessage &recv, bool verbose=false)
receiveMsg(SimpleMessage & message);
sendMsg(SimpleMessage & message)
message manager
接收线程
//manager不断循环接收下位机发送来的消息,并根据不同的消息类型选择handler进行处理
spin(){
while(true):{
this->spinOnce();
}
}
spinOnce(){
connection_->receiveMsg(msg);
handler_->callback(msg);//many handlers according to type
}
//handler
callback(msg){
internalCB(msg);
}
//joint_relay_handler
//把关节值以"/feedback_states""/joint_states"发布出去
joint trajectory action
接收moveit action线程
//把接收的action发布出去,并接收feedback states消息
actionServer_ :"joint_trajectory_action" /goalCB;
pub_trajectory_command_ :joint_path_command"/publisher;//DynamicJointTrajectory
sub_trajectory_state_:"/feedback_states"/subscriber;
sub_robot_status_ ="robot_status"/subscriber;
//循环
void run()
{
ros::spin();
}
streaming
发送线程
joint_trajectory_interface
this->srv_joint_trajectory_ = this->node_.advertiseService(
"joint_path_command", &JointTrajectoryInterface::jointTrajectoryExCB, this);
this->sub_joint_trajectory_ = this->node_.subscribe(
"joint_path_command", 0, &JointTrajectoryInterface::jointTrajectoryExCB, this);
this->srv_stop_motion_ = this->node_.advertiseService(
"stop_motion", &JointTrajectoryInterface::stopMotionCB, this);
jointTrajectoryExCB(DynamicJointTrajectoryptr msg){
std::vector<SimpleMessage> robot_msgs;
trajectory_to_msgs(msg, &robot_msgs);
send_to_robot(robot_msgs);
}
把ros的消息格式转化为tcp通信统一的simple_message格式。
JointTrajectoryStreamer
streamingThread(){
while (ros::ok())
{
ros::Duration(0.005).sleep();
this->mutex_.lock();
SimpleMessage msg, tmpMsg, reply;
switch (this->state_)
{
case TransferStates::IDLE:
ros::Duration(0.250).sleep(); // slower loop while waiting
case TransferStates::STREAMING:
this->connection_->sendAndReceiveMsg(msg, reply, false);
default:
ROS_ERROR("Joint trajectory streamer: unknown state");
this->state_ = TransferStates::IDLE;
break;
}
this->mutex_.unlock();
}
}
send_to_robot(msg)
{
this->mutex_.lock();
{
this->state_ = TransferStates::STREAMING;//
}
this->mutex_.unlock();
return true;
}
MotomanJointTrajectoryStreamer
继承JointTrajectoryStreamer,用法同此。
message type
/*
when send message, the msg_type was labled here
in JointTrajectoryInterface::create_message
*/
//JointTrajPtMessage
init(industrial::joint_traj_pt::JointTrajPt & point)
{
this->init();
this->point_.copyFrom(point);
}
init()
{
this->setMessageType(StandardMsgTypes::JOINT_TRAJ_PT);
this->point_.init();
}