note2_rl
Reinforcement Learning
相比与监督学习,强化学习没有训练数据的输出值,但是有奖励值; 相比与无监督学习,除了训练数据还有奖励规则。
- env: environment
- agent: intelligent robot
强化学习八要素:
- S: state
- A: action
- R: reward,个体在$S_t$采取动作$A_t$对应的奖励为$R_{t+1}$
- $\pi$: policy,策略,即在某一状态下如何选择动作,常以条件概率表示为$\pi(a/s)=P(A_t=a|S_t=s)$,即在状态s时采取动作a的概率
- v: value, 在策略$\pi$和状态s下,进入下一个状态后的价值,又被称为值函数,表示为$v_\pi(s)$. 事实上值函数代表当前状态的价值,而是否能达到目的还跟未来的状态有关,故当前值函数也跟未来状态的值函数有关。v函数可以理解为是在状态稳定之后的该状态下的最终的结果,而R函数是当前的即时奖励。
- $\gamma$: discount rate(reward decay rate), 如果为0,则是贪婪法,即价值只由当前延时奖励决定,如果是1,则所有的后续状态奖励和当前奖励一视同仁。大多数时候,我们会取一个0到1之间的数字,即当前延时奖励的权重比后续奖励的权重大
- $P^a_{ss'}$: state transition model,在当前状态s采取动作a后转到下一个状态s‘的概率,虽然大部分问题的的状态转化模型为1. P predicts the next state, R predicts the next reward.
- $\epsilon$: exploration rate
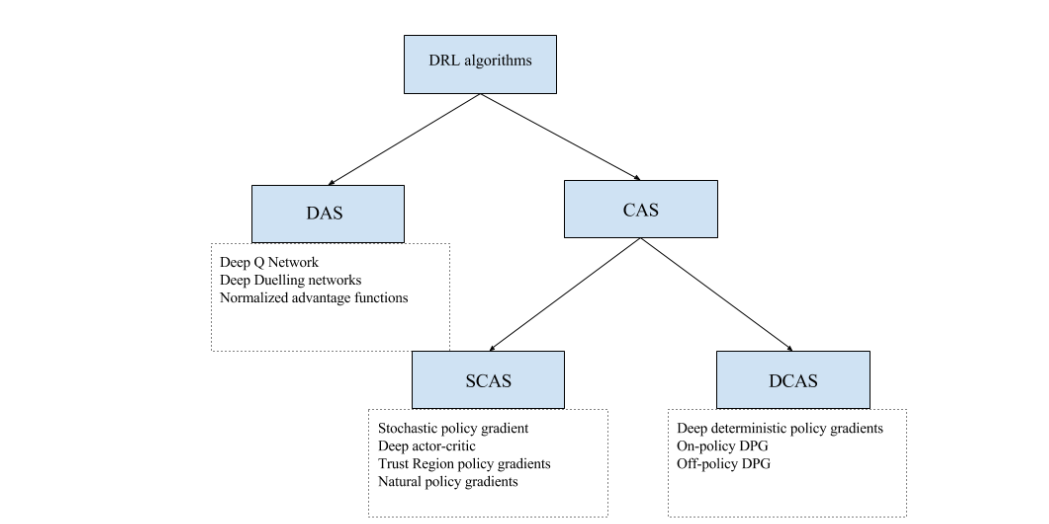
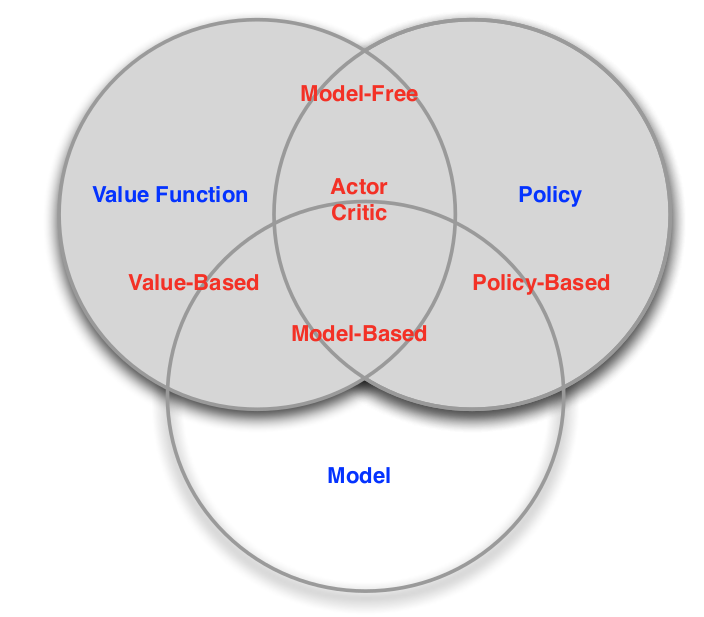
approaches to reinforcement learning: Using deep networks to represent value, policy, model
- categorizing 1
- valued-based
- policy-based
- actor critic
- policy
- value function
- categorizing 2
- model free
- policy and/or value function
- model based
- policy and/or value function
- model
- model free
prediction and control
- prediction: evaluate the future
- given a policy
-
control: optimise the future
- find the best policy
-
预测:给定强化学习的6个要素:状态集S, 动作集A, 模型状态转化概率矩阵P, 即时奖励$r$,衰减因子$\gamma$, 给定策略$\pi$, 求解该策略的状态价值函数$v(\pi)$
- 控制:求解最优的价值函数和策略。给定强化学习的5个要素:状态集S, 动作集A, 模型状态转化概率矩阵P, 即时奖励r,衰减因子$\gamma$, 求解最优的状态价值函数$v_$和最优策略$\pi_$
helpful equation
- 条件边缘概率:$\rho(Z|X)=\sum_Y\rho(Z|X,Y)\rho(Y|X)$
- 条件期望:$E[g(Z)|X]=\sum_Zg(Z)\rho(Z|X)$
Markov Decision Process
The agent’s goal is to maximize the cumulative reward: Discounting reward for a continuous episode: If $0<\gamma< 1$, the sum will be finite as $R_{t}$ is bounded. $\gamma+\gamma^2+\cdots+\infty=\frac{1}{1-\gamma}$
- 状态转化模型:$P_{ss'}^a=E(S_{t+1}=s'|S_t=s,A_t=a)$
- policy:$\pi(a/s)=P(A_t=a|S_t=s)$
- state-value function under policy $\pi$:$v_\pi(s)=E(G_t|S_t=s)=E_\pi(R_{t+1}+\gamma R_{t+2}+\cdots| S_t=s)$
- action-value function for policy $\pi$:$q_\pi(s,a)=E(G_t|S_t=s,A_t=a)=E_\pi(R_{t+1}+\gamma R_{t+2}+\cdots| S_t=s,A_t=a)$
价值函数表示该状态下的价值,而动作价值函数是在该状态下可能的各个动作的价值,价值函数是由这些动作价值函数的期望共同构成的。
递推关系:
最优价值函数: 在局部最优的策略下,状态价值函数应局部最大,动作价值函数应局部最大。
因此值函数便不再是各个值函数的期望,而直接选择最大的值函数。
ergodic Markov process
Dynamic Programming
Dynamic programming is a method for solving complex problems by breaking them down into subproblems and MDP just satisfy the property.
- for prediction
- input: MDP$
Policy Iteration
策略迭代包括策略估计和策略提升。策略评估过程中根据当前策略迭代使得值函数收敛。提升阶段是根据评估时的值函数更新策略。
- policy evaluation:
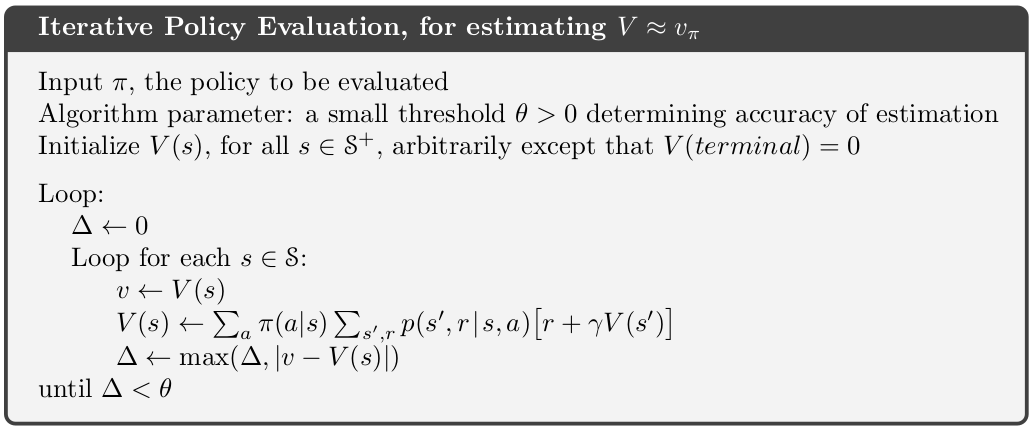
策略已知,通过值函数迭代公式使值函数收敛($\Delta v=0$)。
- Policy improvement
improve the policy by acting greedily: when the iteration stop: the optimal value funtion and optimal policy are found.
在值函数未知及策略未知的情况下(由于最优策略可完全由最有值函数得出,故值函数未知,则最优策略未知),通过值函数迭代公式使值函数收敛($\Delta v=0$),收敛后的值函数便是所求的值函数,因此最优策略也可因此而得出。这里的值函数迭代由于没有策略函数,故采用最优值函数迭代公式,即策略是选择局部最大值函数进行迭代。
value iteration
值迭代再每一步值更新的过程中都重新选择策略,减少了迭代次数。值迭代的更新公式其实就是贝尔曼最优公式。
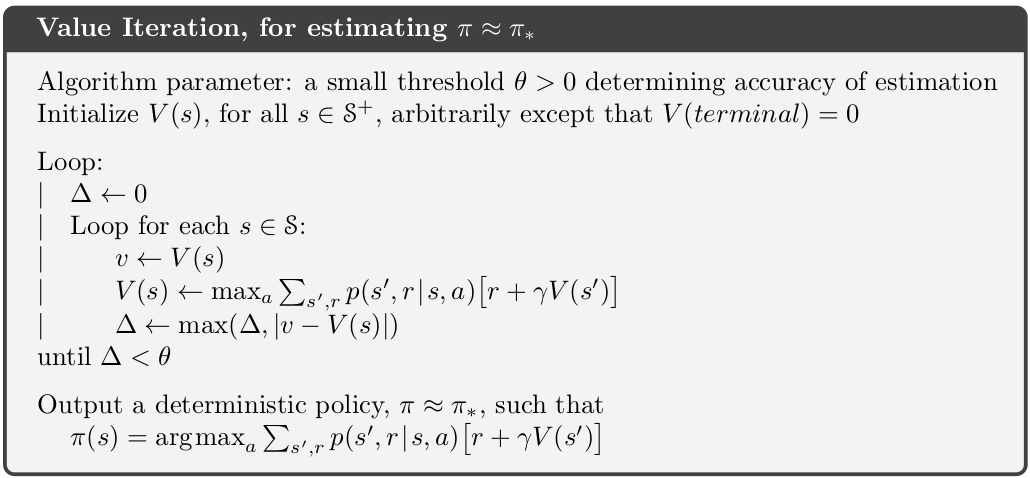
对于预测问题,相当策略已知,通过贝尔曼方程迭代可以求得。而对于控制问题,需要不断更新Q表使其收敛,则最优策略也即得出(最有策略依据最大值函数)。策略迭代:根据探索率更新策略。价值迭代:探索率接近0时,依据值函数更新。
policy-iteration vs value-iteration
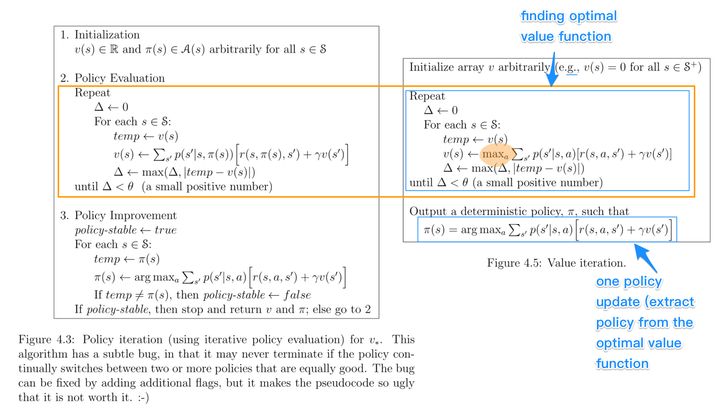
- 在Policy Iteration中
- 第一步 Policy Eval:一直迭代至收敛,获得准确的V(s)
- 第二步 Policy Improvement:根据准确的V(s),求解最好的Action
- 对比之下,在Value Iteration中
- 第一步 "Policy Eval":迭代只做一步,获得不太准确的V(s)
- 第二步 "Policy Improvement":根据不太准确的V(s),求解最好的Action
这两种迭代过程都需要知道采取该动作后的奖励值是多少。
asynchronous dynamic programming - in-place dtnamic programming
not(two copies of value function): $v_{new}(s)\leftarrow\max{a}(R^a_s+\gamma\sum_{s'\in S}P^a_{ss'}v_{old}(s'))$
but(one copy of value function): $v(s)\leftarrow\max{a}(R^a_s+\gamma\sum_{s'\in S}P^a_{ss'}v(s'))$
-
prioritisedd sweeping: use the magnitude of Bellman error to guide state selection
-
real-time dynamic programming
Monte Carlo Methods
We do not assume complete knowledge of the environment. To sample some complete episodes.
不基于模型的强化学习问题,即状态转化概率未知。
-
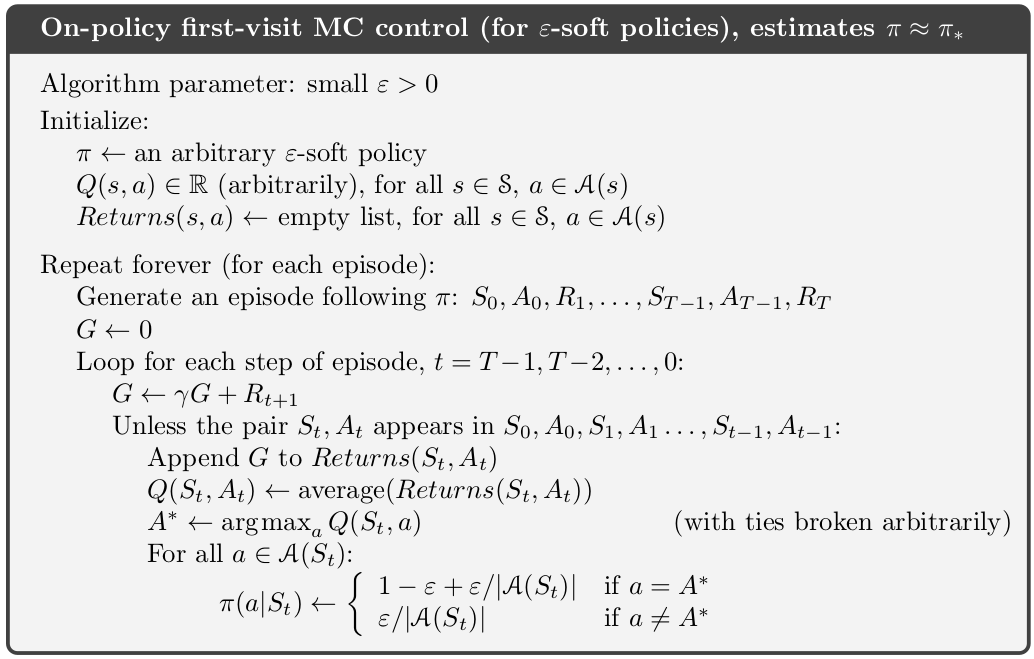
prediction:
- If one state appears many times in one episode:first visit- only consider the first show-up value; every visit- calculate the average
- incremental mean: $\mu_k=\frac{1}{k}\sum^k_{j=1}=\mu_{k-1}+\frac{1}{k}(x_k-\mu_{k-1})$
- control: update every step
- greedy policy improvement over $v(s)$ requires model of MDP
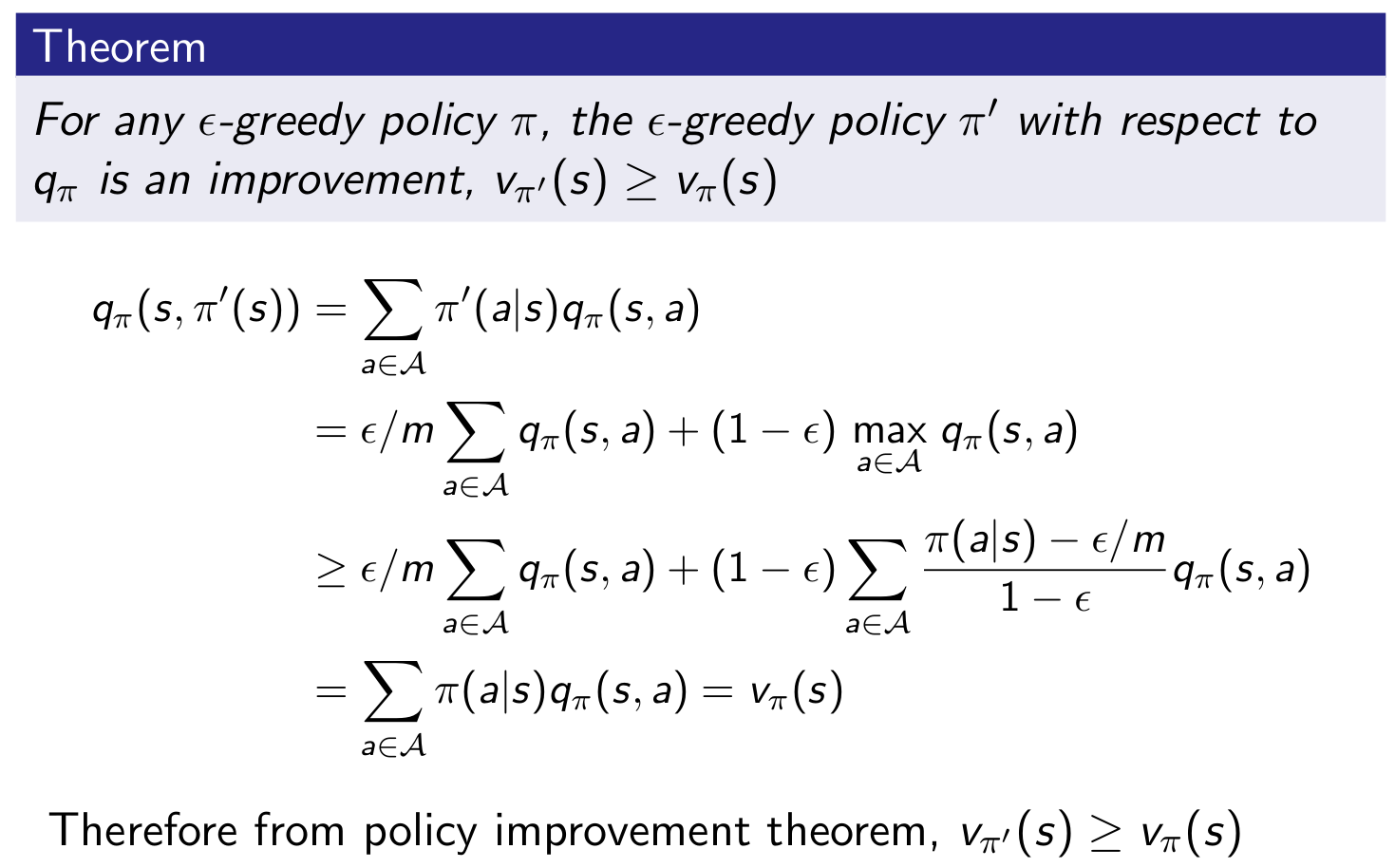
- greedy policy improvement over $q(s,a)$ is model-free
- $\epsilon$ greedy:most of the time they choose an action that has maximal estimated action value, but with probability $\epsilon$ they instead select an action at random. $m=|A(t)|$ is the number of action space dim.
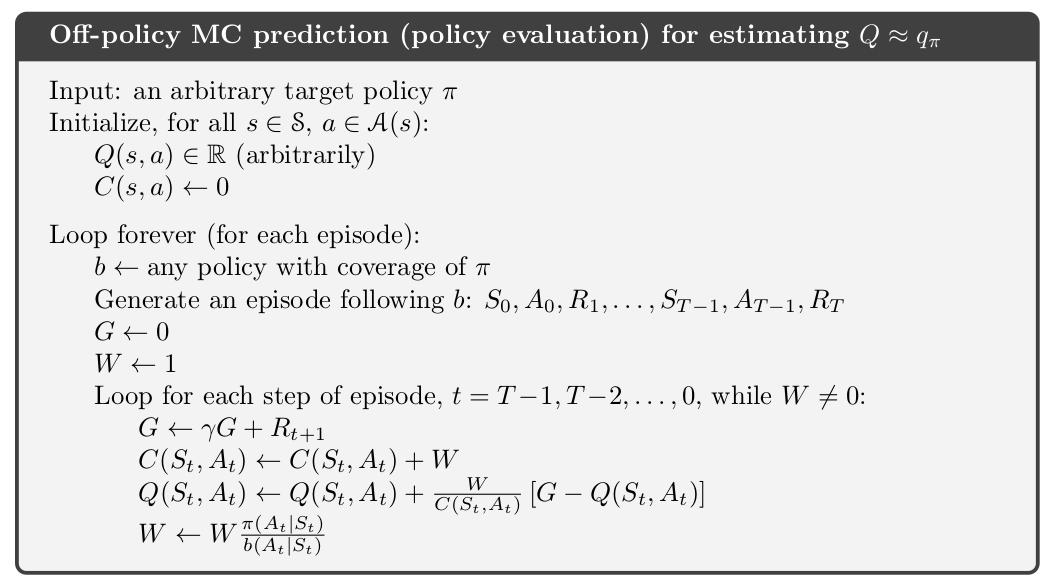
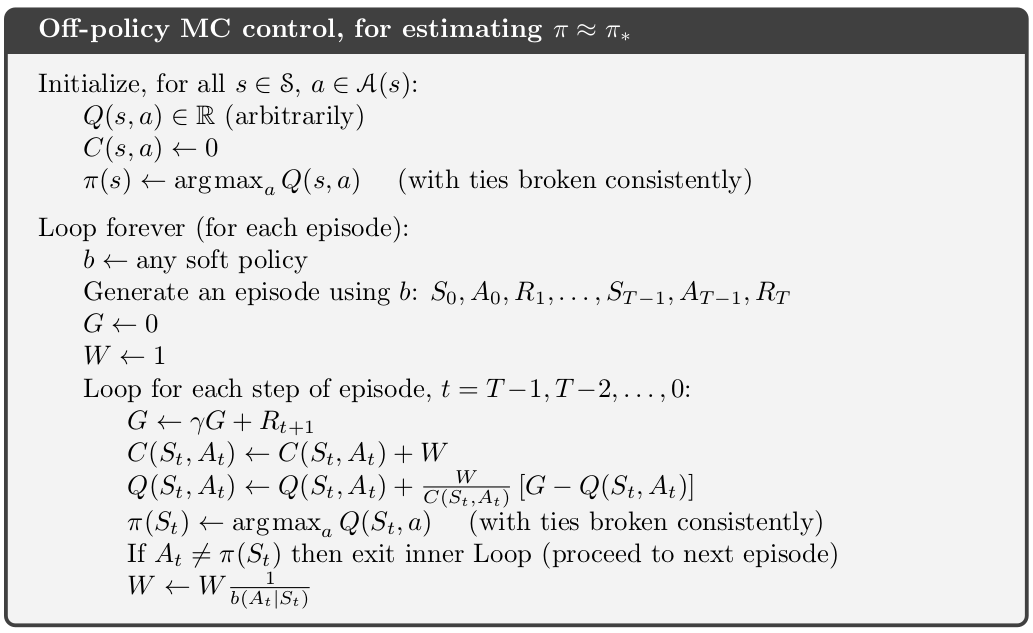
off policy
- on policy:生成样本的policy(value function)跟网络更新参数时使用的policy(value function)相同. 可能会陷入局部最优。
- off policy: 生成样本的policy(value function)跟网络更新参数时使用的policy(value function)不同. Evaluate target policy $\pi(a|s)$ to compute $v_\pi(s)$ or $q_\pi(s,a)$ while following behaviour policy $\mu(a|s)$: ${S_1,A_1,R_1,\cdots,S_T}\sim\mu$
importance sampling: 用一个简单分布去估计服从另一个分布的随机变量的均值
Use returns generated from $\mu$ to evaluate $\pi$ with weight return $G_t$ according to similarity between policies:
Update value towards corrected return:
Incremental Implementation
Temporal-Difference Learning
learns from incomplete episode
iteration, $\alpha\in [0,1]$:
TD($\lambda$)
on policy: SARSA
off policy: Q learning
overview
from 2017-Deep reinforcement learning for robotic manipulation-the state of the art