moveit
calibration AX=XB
YeeKal
•
•
"#moveit"
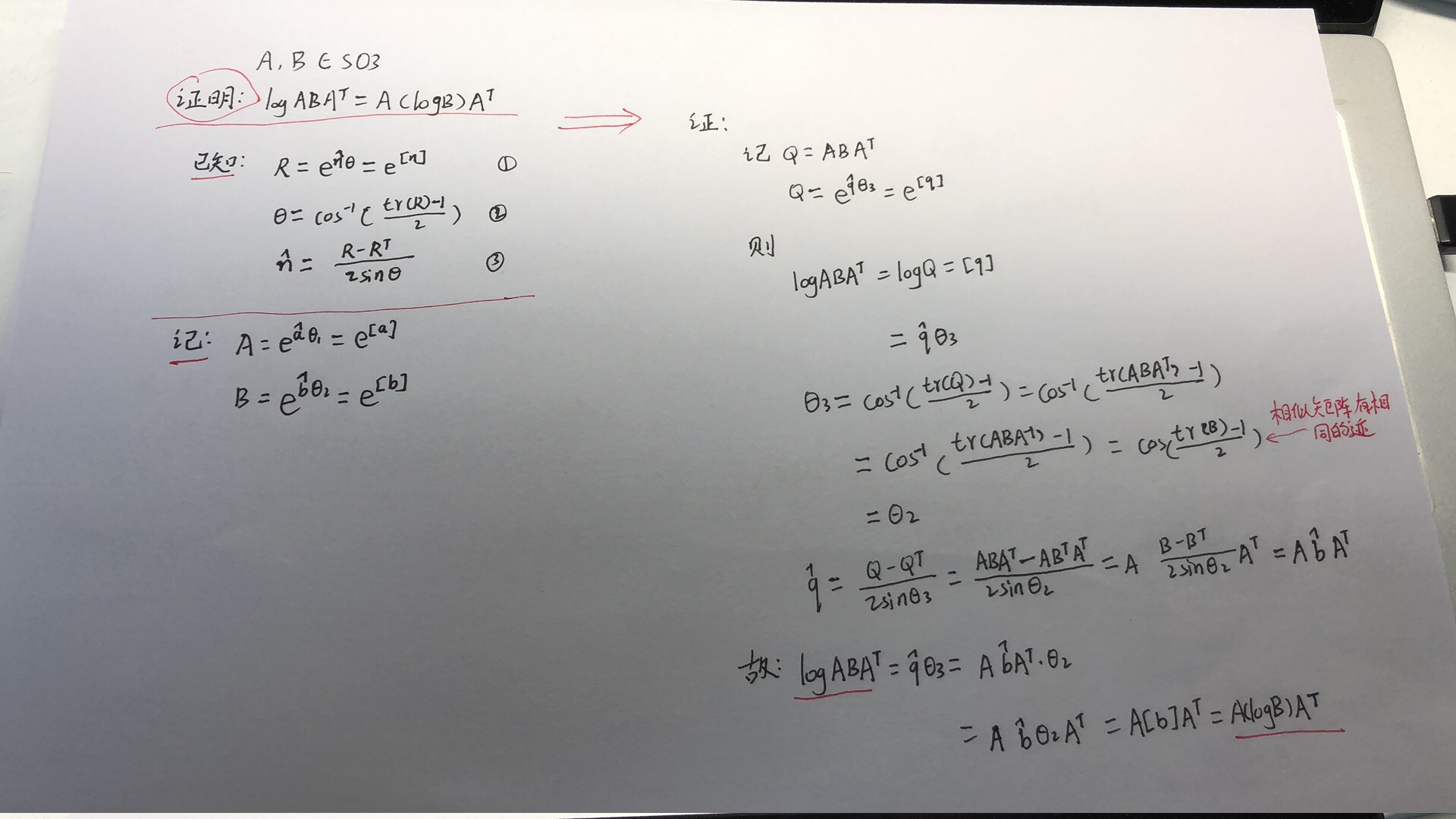
设:$A,B\in SO3$,证明:$log ABA^T=A(log B)A^T$
1994_Robot sensor calibration solving AX=XB on the Euclidean group
设:$A,B\in SO3$,证明:$log ABA^T=A(log B)A^T$
1994_Robot sensor calibration solving AX=XB on the Euclidean group