PGO(pose graph optimization)
YeeKal
•
•
"#"
Introduction
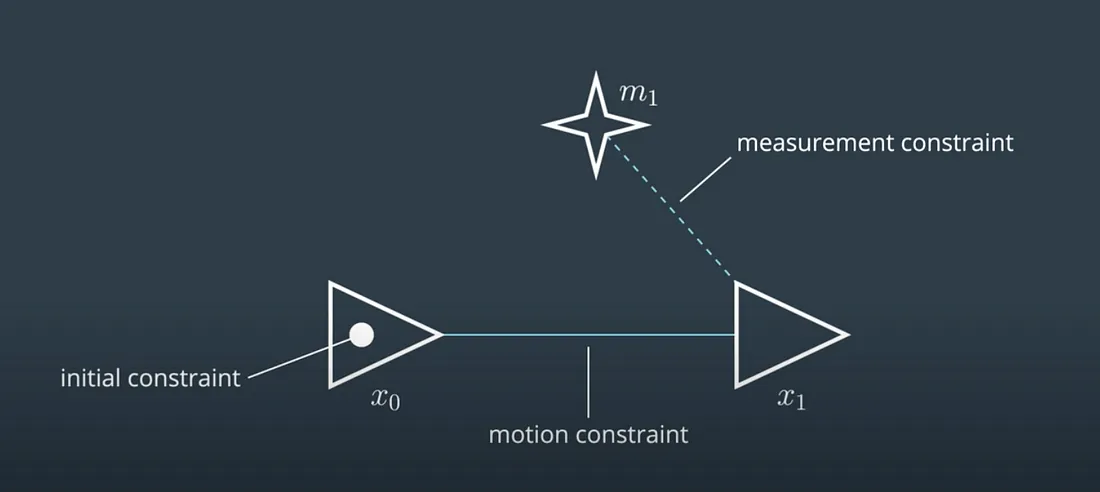
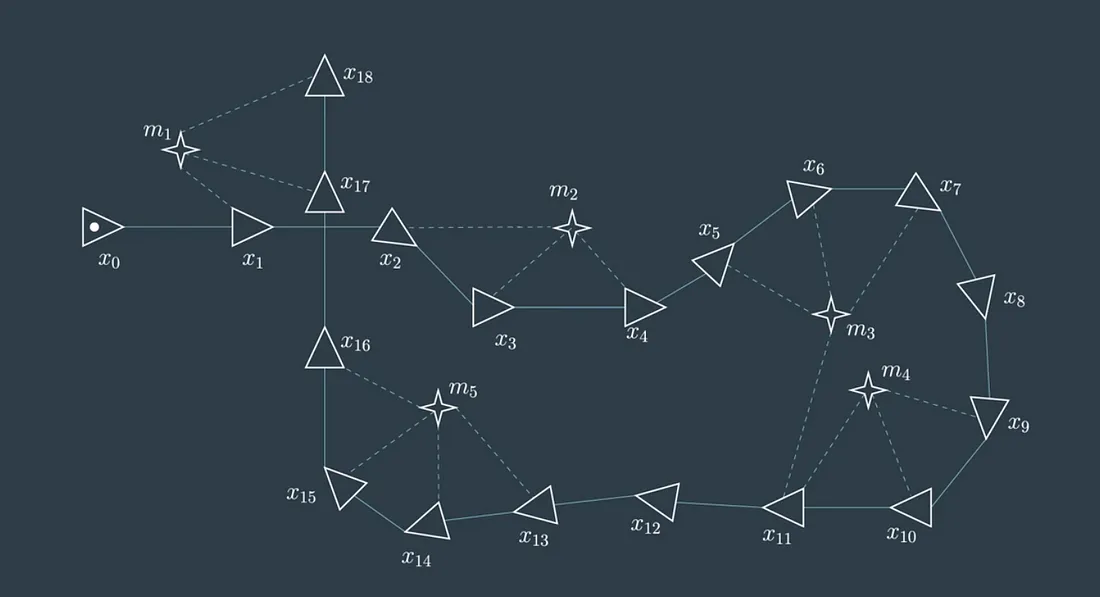
以图结构来表示机器人的位姿和相对关系。其中节点代表位姿,边代表相对关系,这种相对关系也是一种测量的约束关系。这种约束来源于里程计(Odometry)或者是回环检测(loop closure).里程计一般提供了前后连续两个点之间的运动关系,回环检测提供了相对于之前已经出现的位置点的相对观测关系,这种关系约束了位置的测量结果。由于误差的存在。测量的直接结果和观测关系不一定完全对应,这就为回环检测的相对观测位置的优化留下了空间。其中相对观测关系一般被成为软约束,这是相比于相对运动的的硬约束而言。如下图,软约束以虚线表示。
目标函数中,起始点一般置0,作为绝对原点。把相对关系写成相减的形式,平方和作为总误差。优化变量为合个位置节点:
上式中$g,h$是位置转化关系,通常这两个函数并不是线性的,比如加入了旋转。
Linearizing Constraints
对于非线性约束需要把约束函数线性化
Pose Graph Optimization
2D
Library
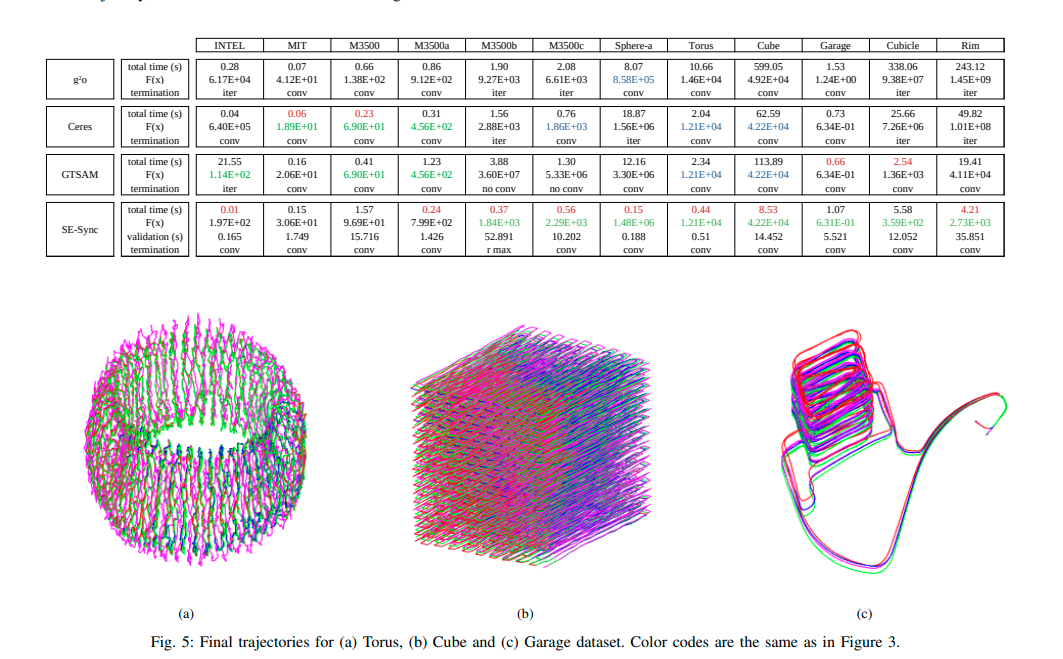
SE-Sync
Ref
- Course
- Paper