navigation
Occupancy Grid Map
YeeKal
•
•
"#navigation"
ref: 占据栅格地图-当机器人遇上了学习
占据栅格地图
- occupancy: 占据率
- occupied state: p(s=1),占据的概率
- free state: p(s=0)
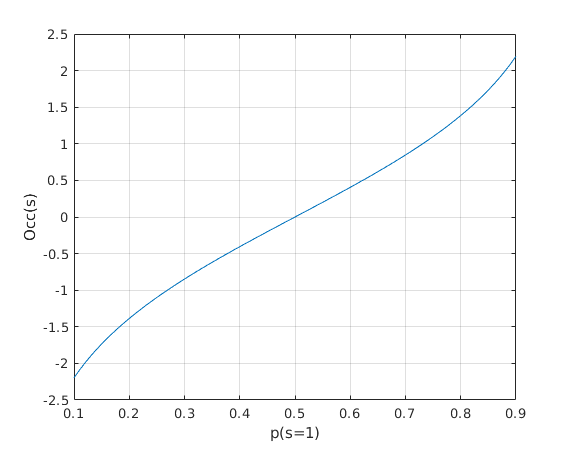
- $Occ(s)=\log Odd(s)=\frac{p(s=1)}{p(s=0)}$, 当前的状态表示
根据新的测量值$z\in [0,1]$,更新当前状态:$Odd(s|z)=\frac{p(s=1|z)}{p(s=0|z)}$.根据贝叶斯公式:
可以得到:
更具测量值而更新的增量部分称为测量值的模型(Measurement Model),记为lomeas。测量值的模型一般为两个常数:
则测量更新规则变为: $S^+=S^-+lomeas$. 在初始状态:
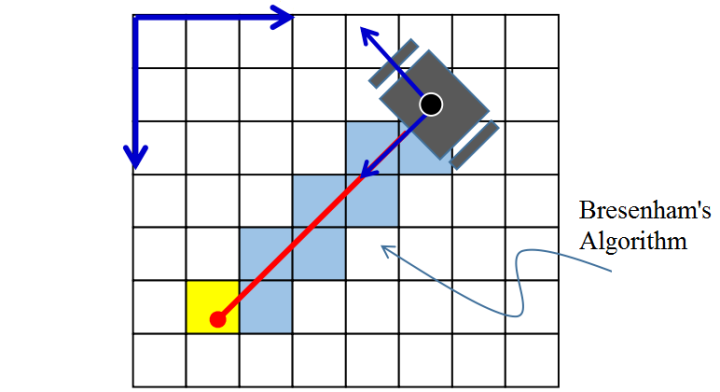
在更新地图中需要把激光检测的障碍物坐标转化为地图离散坐标: 其中,$i,j$为离散地图坐标,r为离散方格边长。另外障碍物点和激光原点之间的非障碍点也需要更新,可以用Bresenham算法来找到两点之间的中间点。