obstacle avoidance
- 按照维度区分
- 2D 平面
- 3D
- 按照优化方案
- 直接计算
- 优化中的梯度计算
两个box 碰撞检测
分两种情况: 有一个点在另一个内部/重叠但是没有点在内部
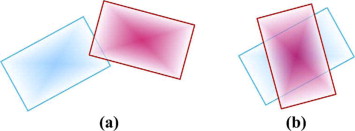
第一种情况 三角形面积大于原始正方形;第二种情况在连续动态的环境里不会发生,如果发生必定已经发生了第一种情况。
两条线的碰撞检测
转化为符号表达式, 参考
polygon point collision
- POLYGON/POINT
- How can I determine whether a 2D Point is within a Polygon?
- PNPOLY - Point Inclusion in Polygon Test
polygon
- polygon circle
- circle with line
- center point in polygon
- polygon rectangle
- rectangle with line
- center point inside polygon
PIVOT2D
优化问题中的平面凸多边形碰撞检测的处理
PYROBOCOP: Python-based Robotic Control & Optimization Package for Manipulation and Collision Avoidance
Orthogonal Collocation Method 正交配置法, 是加权余项法(Method of Weighted Residuals)的一种, 与传统差分法相比,具有计算精度高和稳定性好等优点.
mathematical programs with complementarity constraints (MPCCs)
Collision avoidance
where $1^T \alpha_i=1$ means the convex linear combination of the polytopes.
Reformulate using First-order stationary conditions.
DCA
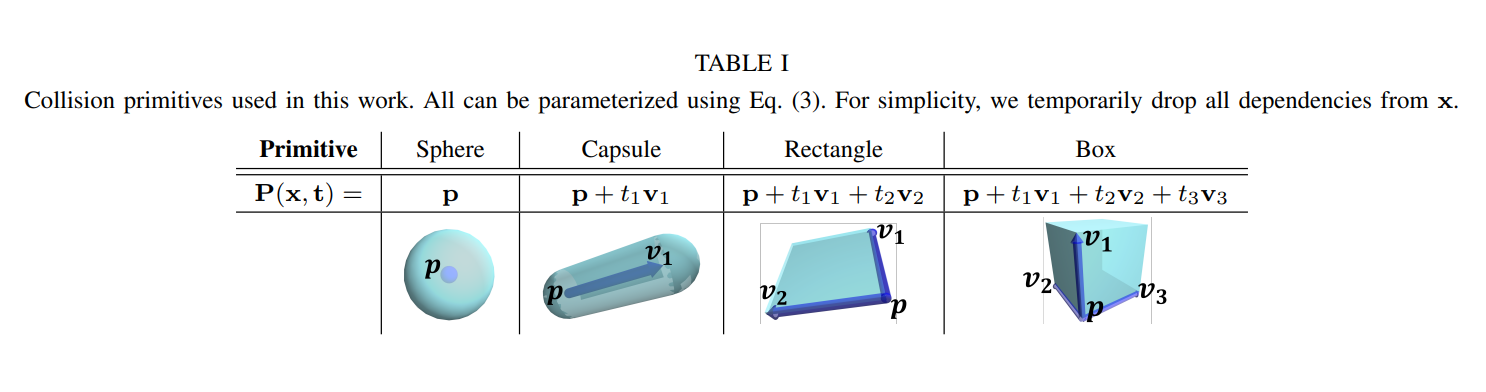
2022 Differentiable Collision Avoidance Using Collision Primitives
Zimmermann S, Busenhart M, Huber S, et al. Differentiable collision avoidance using collision primitives[C]//2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022: 8086-8093. - video - 🐯 code:DCA-Differentiable collision avoidance - 2022 iros; Collision Primitives - ref:Optimal control via second order sensitivity analysis
Algorithms:
usion basic collision primitives to represent obstacle:
- barrier function
- make collision constraints soft
Barycentric coordinates(重心坐标)
2022 Motion Planning around Obstacles with Convex Optimization
-
Mixed-Integer Convex Programming (MICP)
- Second-Order-Cone Programs (SOCPs)
- ref
2022 finding and optimizing certified, collision-free regions in configuration space for robot manipulators
C-Iris: C-space Iterative Regional Inflation by Semidefinite programming- code:C_Iris based drake
computing collision-free C-space regions: - maximal-volume ellipse - maximal expansion of the polytope

2022
Ref
- paper
- Certifying Bimanual RRT Motion Plans in a Second
- Closed-Form Minkowski Sum Approximations for Efficient Optimization-Based Collision Avoidance
- Efficient Formulation of Collision Avoidance Constraints in Optimization Based Trajectory Planning and Control
- PYROBOCOP: Python-based Robotic Control & Optimization Package for Manipulation and Collision Avoidance
- 2004 Efficient collision detection between 2D polygons
- 2022-Differentiable Collision Detection for a Set of Convex Primitives
- 2022_Motion Planning using Reactive Circular Fields:A 2D Analysis of Collision Avoidance and Goal Convergence
- 2022 Motion Planning around Obstacles with Convex Optimization
- finding and optimizing certified, collision-free regions in configuration space for robot manipulators
- blog