22_optimization_based_motion_planning
YeeKal
•
•
"#"
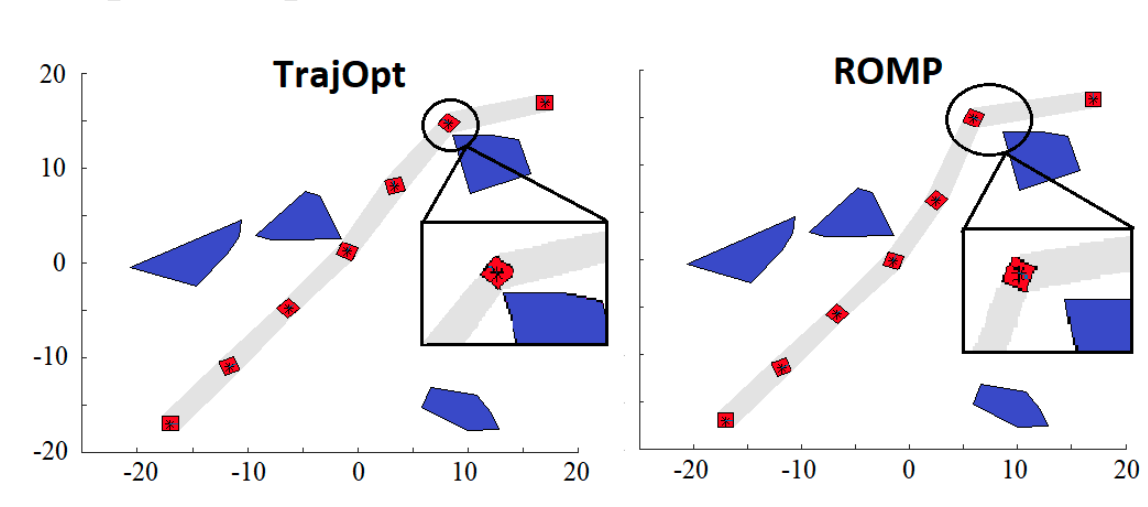
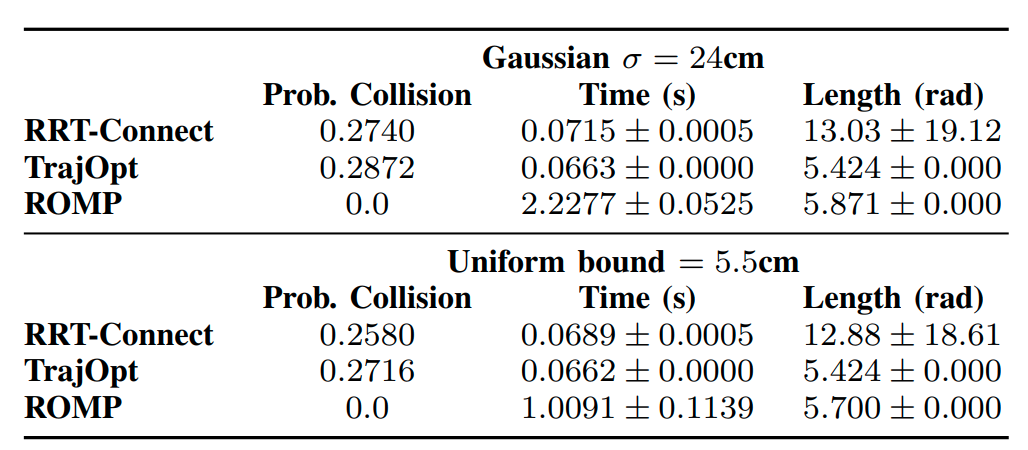
2021 ICRA ROMP
handle obstacle collision
Experiment
SemiInfiniteOptimization
signed distance fields (SDFs)
fast marching method