轨迹插值和轨迹拟合
- optimization based motion planning
- optimization based optimal control
从最优控制的角度,轨迹优化侧重于在满足状态约束情况下获得最优的控制量。从运动规划角度,轨迹优化侧重于获得最优的状态量。当然大部分情况下两者是统一的。
Methods form Optimal control perspective
最优控制的解法一般有三种方法:
- Dynamic Programming: Solve Hamilton-Jacobi-Bellman Equations over the entire state space.
- Indirect Methods: Transcribe problem then find where the slope of the objective is zero.
- Direct Methods: Transcribe problem then find the minimum of the objective function
轨迹优化主要关注第三种即直接法,通过构造一个优化问题进行求解。直接法又分为shooting和collocation方法,主要是从状态方程的表示方法上区分的。
Direct method Shooting: 离散控制量,根据状态方程通过积分求得状态量 - single shooting - multiple shooting
Collocation(Simultaneous method):同时离散控制量和状态量,把状态方程当作等式约束 - Direct collocation - Orthogonal collocation
Pseudospectral(伪谱法):
Methods form motion planning perspective
运动规划的视角更关注状态的相关约束怎么表示,比如轨迹的曲率,障碍物的表示等等。这些轨迹优化的方法难以进行系统性的区分。比较知名的基于优化的规划器:
- TEB
- CHOMP
- STOMP
- TrajOpt
- ...
运动规划视角: 轨迹拟合 轨迹插值 轨迹优化
离散空间
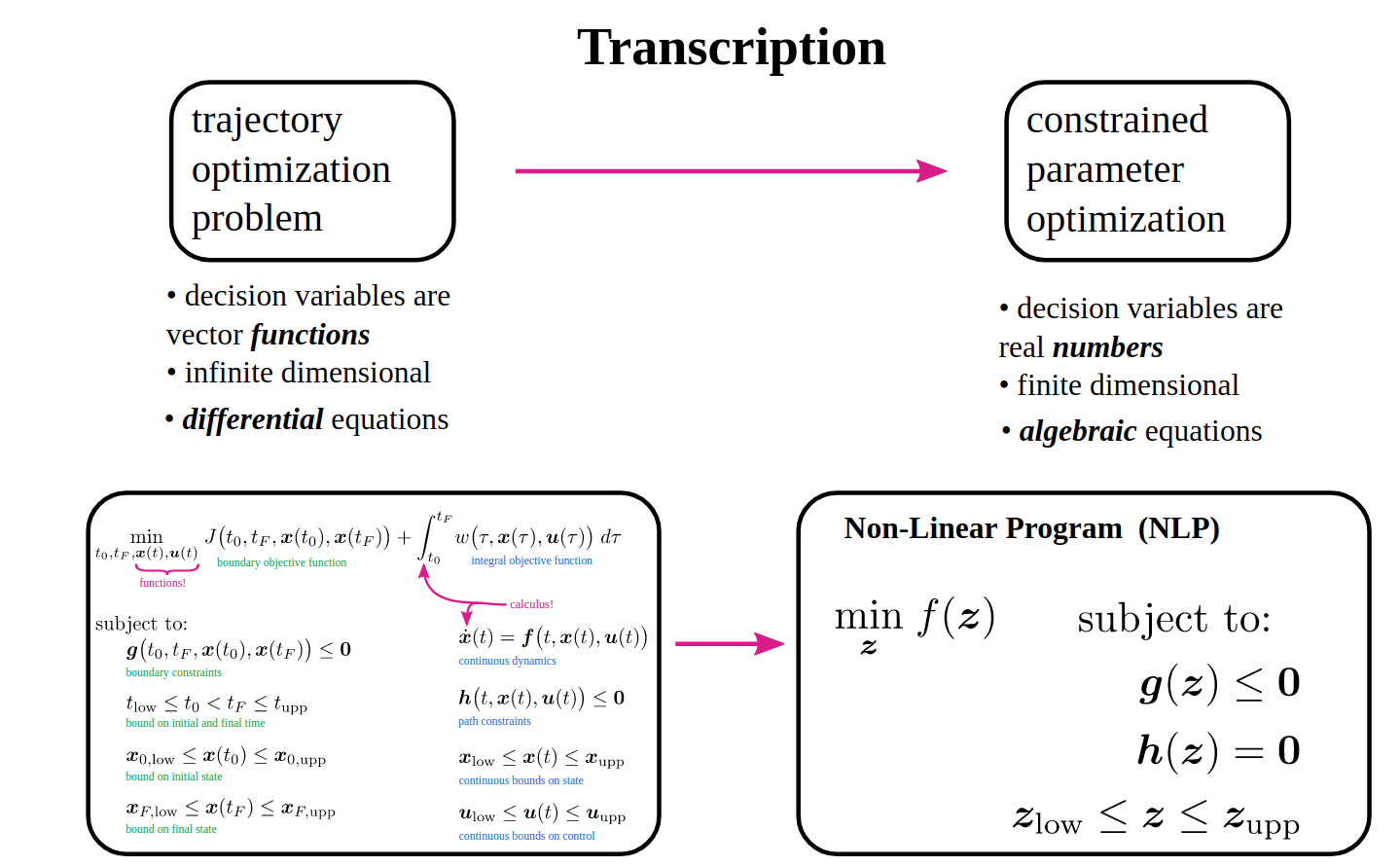
轨迹优化是一个求解泛函优化的问题。可以将该问题离散化。转化为一个函数优化的问题,降低求解难度。(泛函优化和函数优化)即直接求解轨迹点而不关注该函数的表达式。把一个微分方程转化为有mn(维度控制点)个优化参数的优化问题。
微分方程和离散法对比:基于微分方程的变分法是更加精确的解法,但是求解通常比较困难,特别在复杂问题以及有约束的情况下。而离散优化的方法则更加通用,降低求解复杂度,虽然牺牲了一些精确性(由于插值的存在,曲线可能不是最优)。
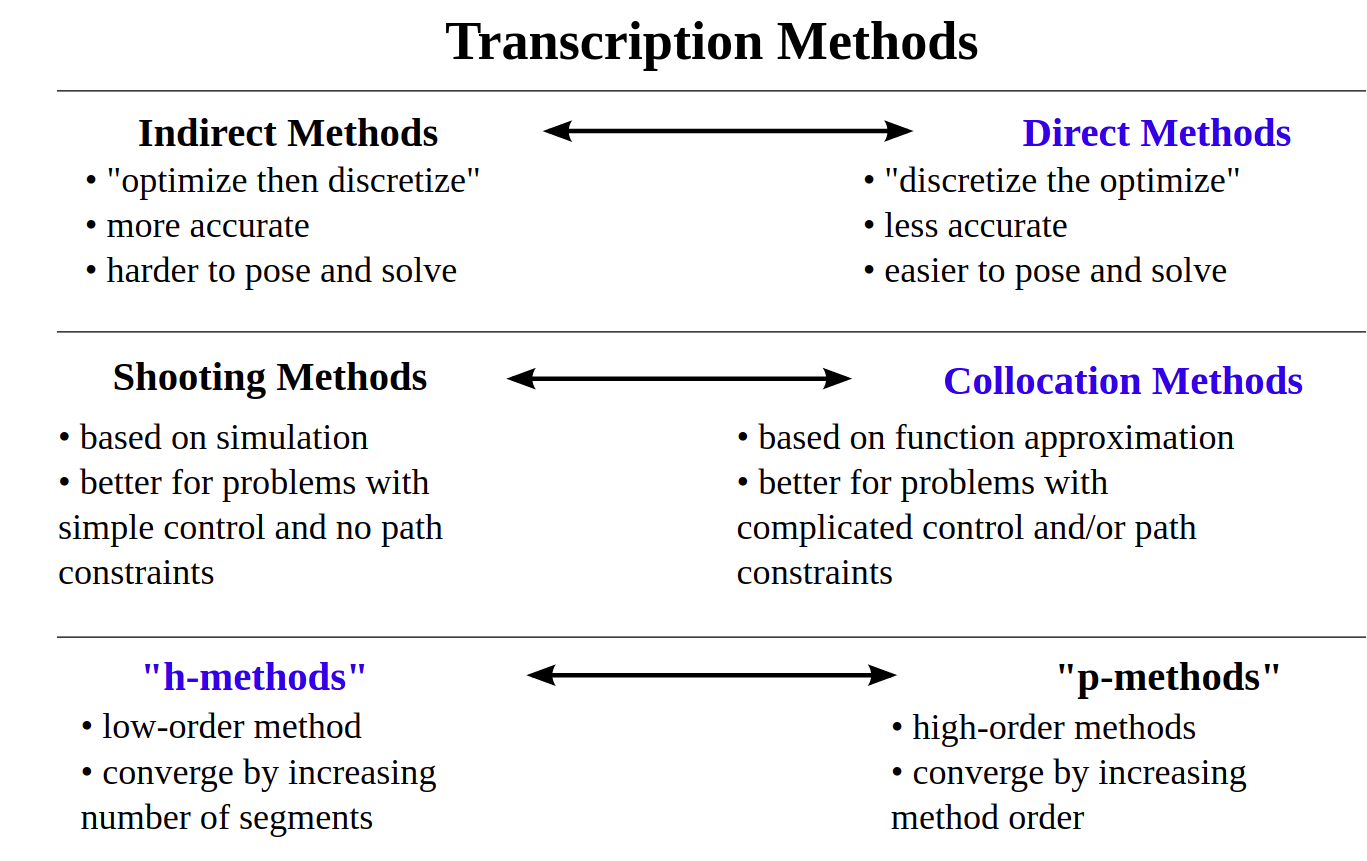
- mesh refinement:
- h-method: increase number of segments
- p-method: increase polynomial order
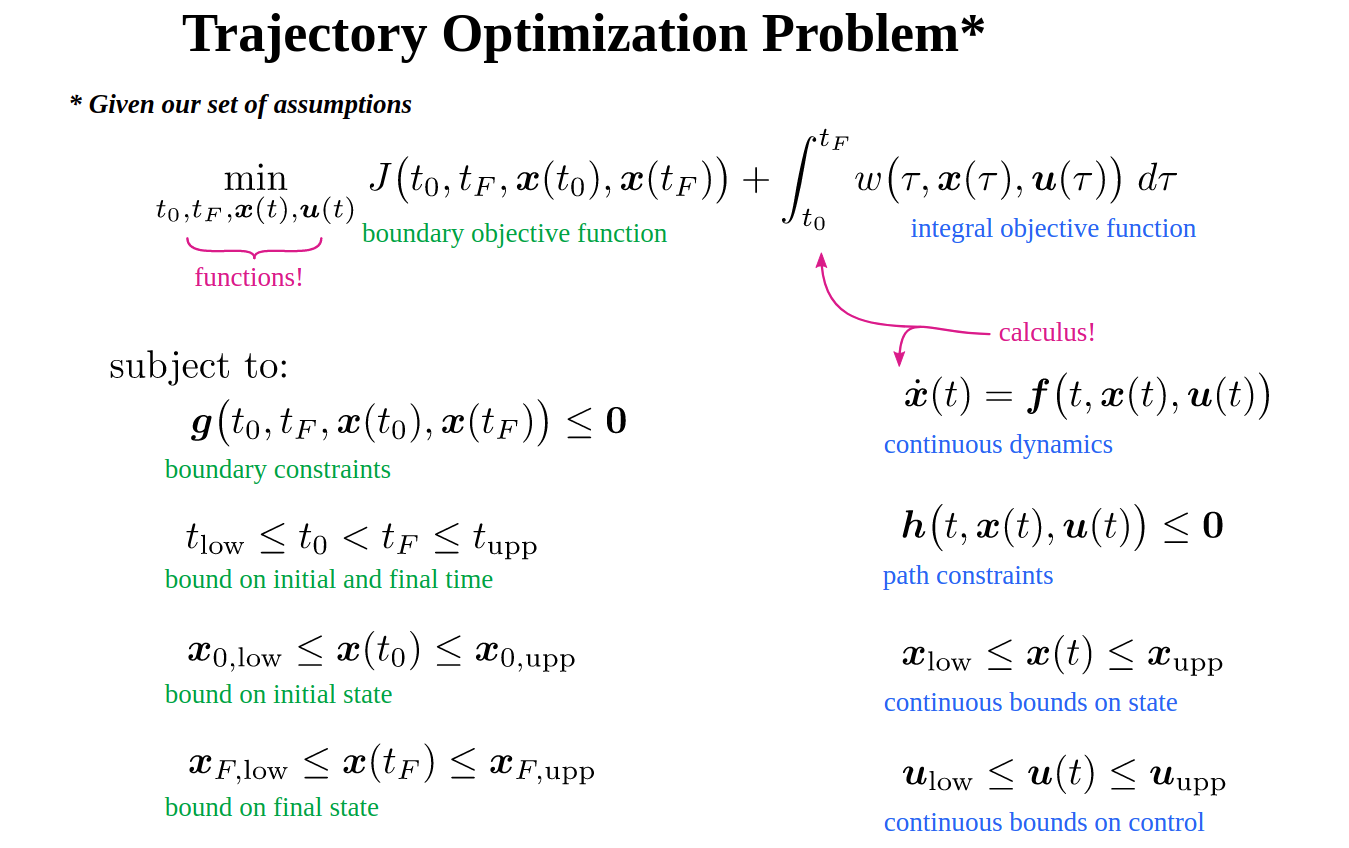
轨迹优化
- 约束: 系统动力学。边界条件
- 可行解: 满足约束的解
- 目标函数: 包含边界项和积分项
- 最优解: 最小化目标函数的解
变分法
设优化目标是使加速度的积分最小:
其对应泛函:
根据E-L(欧拉拉格朗日)方程: 可推导出x具有三次多项式的形式:
同理可以求得:
- 3次多项式:最小加速度
- 5次多项式:最小jerk
- 7次多项式: 最小snapw
轨迹拟合
通过连续曲线连接路经点。
polynomials
对每个数据维度都进行拟合
三次多项式曲线: $\theta(t)=a_0+a_1t+a_2t^2+a_3t^3$
边界条件:
保证速度连续,有唯一解
多个数据点 -> 曲线拟合:
- n个数据点, m维度(维度:拟合的曲线参数组数跟数据点的维度一致)
- (n-1)m条曲线, 4(n-1)*m个变量
- 首尾边界条件 + 中间边界条件 + 中间(一阶+2阶)连续条件 = 2m+2(n-2)m+2(n-2)m=(4(n-1)-2)*m
- 两个自由度导致的边界条件
- 自然边界条件,二阶导在边界处为0
- 第一边界条件,二阶导在边界处已知
- 第二边界条件,一阶导在边界处已知
ref: Cubic_Spline_Interpolation
solve:
- 直接解线性方程组
- Cubic Hermite spline
- 结合拉格朗日插值
正交多项式
根据变分法中求得的微分方程,需要根据具体条件解出该方程的参数。这里可以使用正交多项式来求解。
两类常用正交多项式:
- 多项式轨迹拟合:
- 最小加速度: $x(t)=a_{0}+a_{1} t+a_{2} t^{2}+a_{3} t^{3}$
- 最小jerk: $\quad x(t)=a_{0}+a_{1} t+a_{2} t^{2}+a_{3} t^{3}+a_{4} t^{4}+a_{5} t^{5}$
- 最小snap: $\quad x(t)=a_{0}+a_{1} t+a_{2} t^{2}+a_{3} t^{3}+a_{4} t^{4}+a_{5} t^{5}+a_{6} t^{6}+a_{7} t^{7}$
-
三角函数轨迹拟合:
- 正弦轨迹: $ x(t)=a_{0}+a_{1} \cos a_{2} t+a_{3} \sin a_{2} t $
- 摆线轨迹: $ x(t)=a_{0}+a_{1} t-a_{2} \sin a_{3} t $
- Fourier轨迹: $x(t)=\frac{A_{0}}{2}+\sum_{n=1}^{\infty}\left[A_{n} \cos n t+B_{n} \sin n t\right]$
数值积分
插值型数值积分方法:
- 梯形公式: $I_{1}(f)=\frac{b-a}{2}(f(a)+f(b))$
- Simspon公式: $I_{2}(f)=\frac{b-a}{6}\left(f(a)+4 f\left(\frac{a+b}{2}\right)+f(b)\right)$
- cote
- gauss
- 复化Simspon
- ....
Runge-Kutta methods
对于一个积分问题, 我们希望通过离散的微分得到积分值. 举例来说,对于初值问题:
这里f是已知的,即导数是可以精确得到的.如果已知$y_n$, 在较小时间步长$h$下, 可以得到$y_{n+1}$:
这也被称为一阶精度的欧拉公式, 其累积误差为$O(h)$.
一种改进的欧拉法:
Runge-Kutta方法进一步修正了迭代方法:
- $k_1$是时间段开始时的斜率;
- $k_2$是时间段中点的斜率,通过欧拉法采用斜率$k_1$来决定y在点tn + h/2的值;
- $k_3$也是中点的斜率,但是这次采用斜率$k_2$决定y值;
- $k_4$是时间段终点的斜率,其y值用$k_3$决定。
上述是4阶Runge-Kutta方法, 也被称为RK4, 其每步的误差是$h^5$阶,而总积累误差为$h^4$阶.
'''implemented in shooting method'''
f = Function(x, u)-> [xdot, L] # L(x, u) is the cost
Q = 0 # overall cost
for j in range(M):
k1, k1_q = f(X, U)
k2, k2_q = f(X + DT/2 * k1, U)
k3, k3_q = f(X + DT/2 * k2, U)
k4, k4_q = f(X + DT * k3, U)
X=X+DT/6*(k1 +2*k2 +2*k3 +k4)
Q = Q + DT/6*(k1_q + 2*k2_q + 2*k3_q + k4_q)
Trapezoidal
Integrals:
system dynamics:
Interpolation: 从控制点恢复连续轨迹
Hermite–Simpson
system dynamics
Interpolation: 从控制点恢复连续轨迹
最优控制
ref
- blog
-
project
-
course
{kind=link}
L1 Course Introduction: https://youtu.be/xWPViQ6LI-Q
L2 MDPs: Exact Methods: https://youtu.be/H_9YQBN45fo
L3 Discretization of Continuous State Space MDPs: https://youtu.be/mJlAfKc4990
L4 Function Approximation / Feature-based Representations: https://youtu.be/I0LykEdXDPk
L5 LQR, iterative LQR / Differential Dynamic Programming: https://youtu.be/S5LavPCJ5vw
L6 Unconstrained Optimization: https://youtu.be/77dOsZbAGgU
L7 Constrained Optimization: https://youtu.be/gFewyKcDFXI
L8 Optimization-based Control: Collocation, Shooting, MPC (basics/foundations): https://youtu.be/ha60pQdepMY
L9 Optimization-based Control: Collocation, Shooting, MPC, Contact-Invariant Optimization (advanced) -- Igor Mordatch: https://youtu.be/pBCVQbZtv78
L10 Motion Planning: RRT, PRM, Trajopt, 3-d poses: https://youtu.be/ZDuoQRutcfk
L11 Probability Review, Bayes Filters, Multivariate Gaussians: https://youtu.be/xamzdNUN1o0
L12 Kalman Filtering, EKF, UKF -- Ignasi Clavera: https://youtu.be/eCjffhEeQyw
L13 Smoother, MAP, Maximum Likelihood, EM, KF parameter estimation: https://youtu.be/qHLLMg0Teg4
L14 Particle Filters -- Wolfram Burgard: https://youtu.be/8k--yWn8_ds
L15 POMDPs: https://youtu.be/2dNp7QyoF_k
L17 Imitation Learning -- Laura Smith: https://youtu.be/8uQkk-JFHtA
L18 RL1: Policy Gradients: https://youtu.be/LsKXJl-_kzk
L19 RL2: Off-policy RL: https://youtu.be/QASqaj_HUZw
L20 RL3: Model-based RL: https://youtu.be/Y2XBiUtZo1k
L21 How do simulators work? https://youtu.be/HRp6DH5M7Co
L22 Sim2Real -- Josh Tobin: https://youtu.be/ac_W9IgKX2c
L23 INDUSTRY: Skydio (drones): Adam Bry/Hayk Martirosyan: https://youtu.be/Yizyv8MpYfg
L24 Backstories behind how some papers were originated and came together: https://youtu.be/kr6k_SyKsh0
L25 Autonomous Helicopters and Course Wrap-Up: https://youtu.be/qKZhtYviqSU
Full Course: https://people.eecs.berkeley.edu/~pabbeel/cs287-fa19/
- paper