Punyo —— 像气泡一样软的机器人
对人机器人拿取物体,我们通常会想到机器人会跟我们一样用手指抓取物体。然而,对于大多数人类来说,与物体的交互可能要复杂得多,我们会使用任何方便的身体部位来帮助我们处理那些大型、重型或笨拙的物体。比如用耳朵和肩膀夹着手机接电话,用双手和胸部怀抱一大摞书等。在丰田研究院(Toyota Research Institute, TRI)的实验室里,一个名为Punyo的软体机器人正在以一种全新的方式与周围的世界互动。

Punyo的名字源自日语中的“ぷにょ”,意味着柔软、可爱且有弹性,这恰恰反映了其设计理念。Punyo的手、臂和胸部覆盖着柔软材料和触觉传感器,因此它可以感觉到接触。柔软性使Punyo能够适应它正在操控的物品,从而实现稳定性、增加摩擦力和均匀分布的接触力。
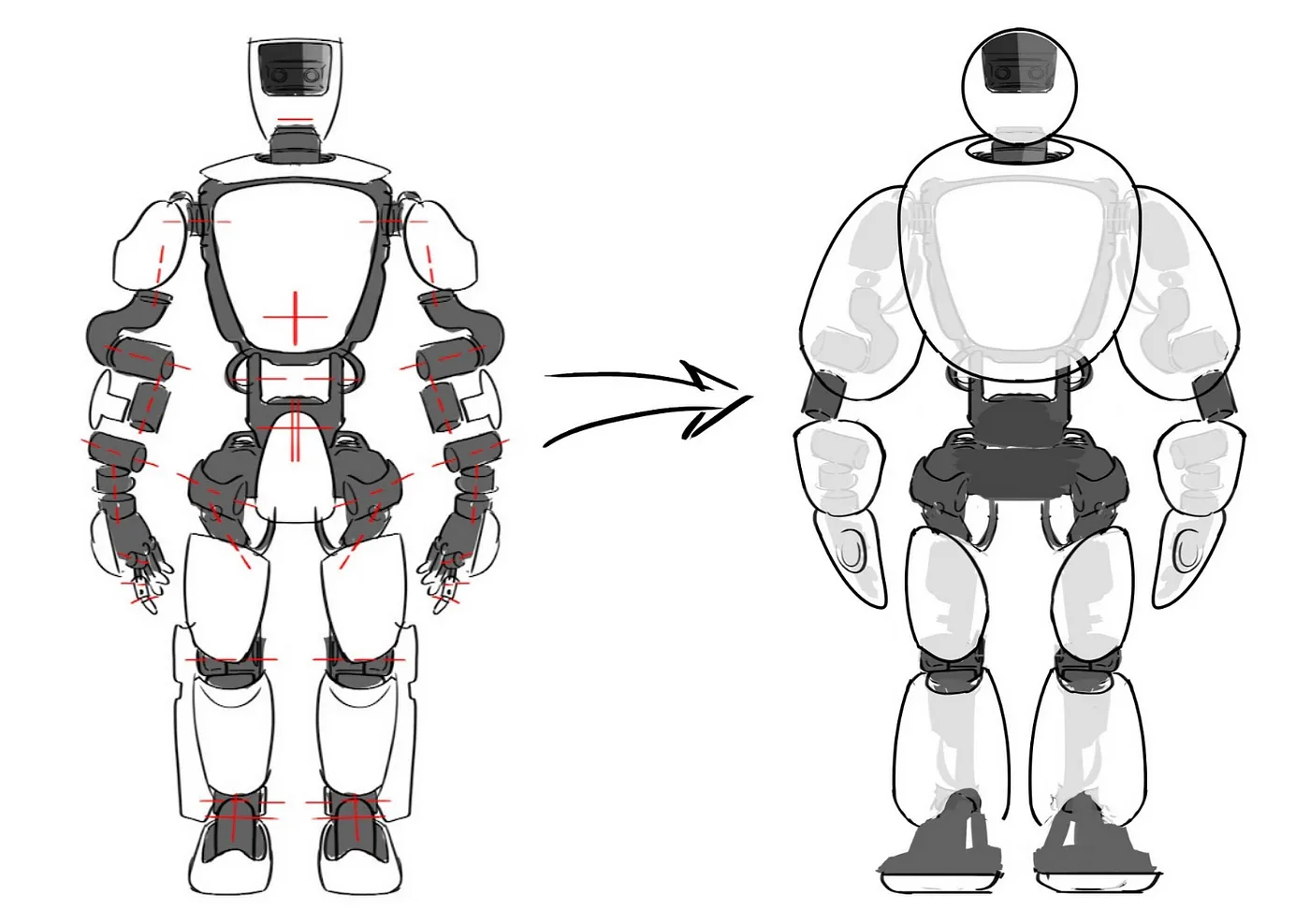
虽然Punyo被认为是一个软体机器人,但在它的柔软性之下是两个“硬”机器人臂、一个刚性躯干框架和一个腰部执行器。Punyo结合了传统机器人的精确性、力量和可靠性与气动软体机器人系统的顺从性、抗冲击性和感应简单性。
从肩部到手腕,Punyo的手臂覆盖着充满空气“气泡”,类似于覆盖我们骨骼的肉体。每个气泡通过一根管子连接到一个压力传感器,该传感器感知施加到气泡外表面的力。
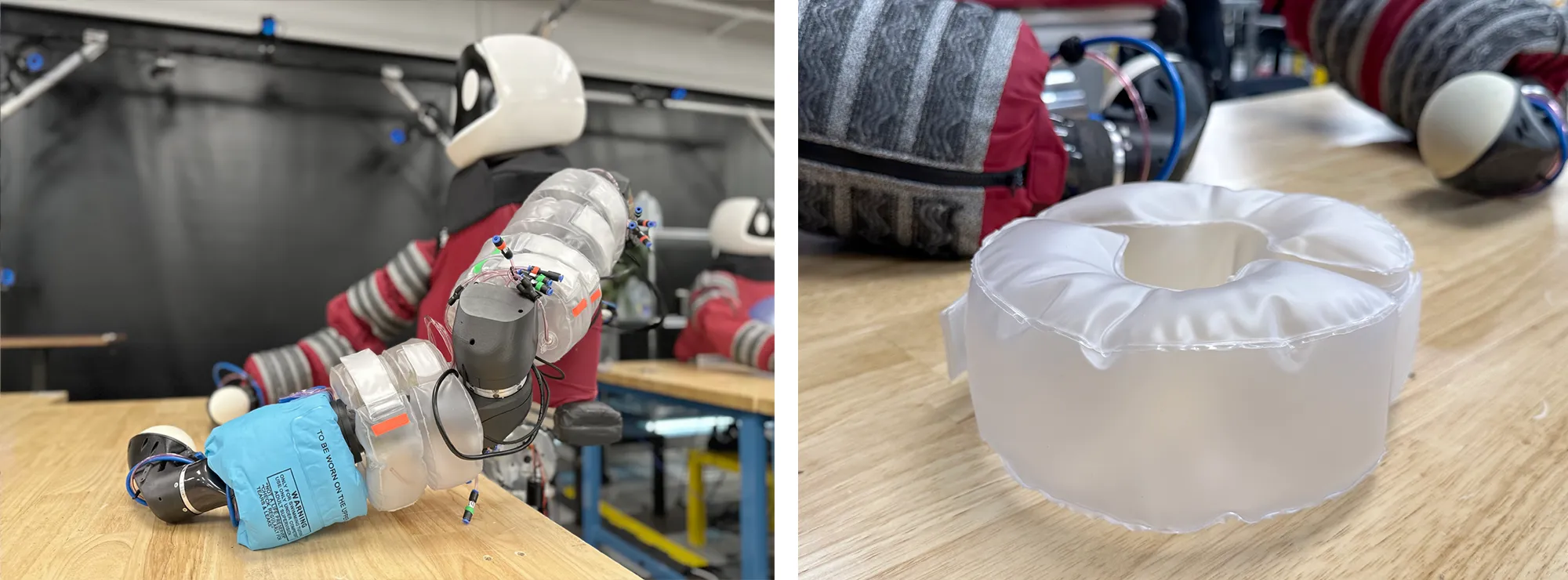
Punyo的“爪子”是一个单一的高摩擦力乳胶气泡。这些气泡内部印有点状图案。当气泡与某物接触时,点状图案会发生变形。内部摄像头利用这种变形来估计力,并将图像直接输入到视觉运动策略中。
使用额外的身体加强对物体的操控性,对人类来说是自然发生的事情,但是对于Punyo却不是一个微不足道的问题。因为点接触之间的交互是相当好理解的。一旦你把大的柔软表面和大的柔软物体混合在一起,这就不是大多数机器人准备好应对的了。Punyo的柔顺性意味着当抓住一个物体时,它可能不会完全落在计划的地方,或者,例如,如果机器人把物体撞到桌子的边缘,它可能会在机器人的抓握中移动。出于这些原因,Punyo的研究人员很关注触觉感应,并深入研究如何测量和控制操纵的物体的状态。Punyo关注的不是高精度任务,而是粗略的全身操控.
为了让Punyo能更灵活地操纵物体,首先Punyo通过远程操作和自主学习相结合的方式不断提升自己的技能。研究人员使用游戏手柄来控制Punyo的手臂和胸部,就像操纵一个高级的玩具一样。通过这种方式,Punyo学会了如何抓取、举起和操纵各种物品。
比如学习搬运大瓶水桶:
看这利索的搬矿泉水的动作:

研究人员还提出了规划引导强化学习(Plan-Guided Reinforcement Learning, PGRL)的操控策略. 研究人员首先使用RRT采样的方法生成一系列的轨迹路径点,作为机器人的参考路径集合。然后再放到强化学习的框架内,抽象出参考运动集合中的更广泛的运动特征,以这些特征引导机器人完成任务。
Punyo是一个有趣的机器人,为我们提供了与机器人互动的新视角。期待Punyo能像大白一样不仅仅能怀抱物体,还可以给人们大大的拥抱。